天津大學與清華大學聯(lián)合研發(fā)出一款“雙環(huán)路”腦機接口系統(tǒng)�。此系統(tǒng)不僅精度更高、能耗更低���,還能處理更為復雜的任務。
這款基于憶阻器神經(jīng)形態(tài)器件的無創(chuàng)演進腦機接口系統(tǒng)���,成功揭示了腦電發(fā)展與解碼器演化在腦機交互過程中的協(xié)同增強效應��,實現(xiàn)了人腦對無人機的高效四自由度操控����。2月17日��,這一成果在最新一期《自然·電子》上刊發(fā)��。
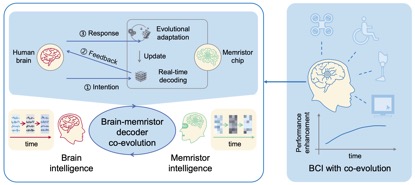
協(xié)同演進腦機接口框架��。(聯(lián)合研究團隊供圖)
腦機接口能實現(xiàn)大腦與機器直接信息交流���,促進生物智能與機器智能融合�,被公認為是新一代人機交互和人機混合智能的核心技術。如何通過腦機之間的信息交互實現(xiàn)“互學習”��,進而促進腦機智能的協(xié)同演進��,是突破腦機性能瓶頸的重點和難點�。但目前腦機交互過程中大腦與機器的動態(tài)耦合機制尚未厘清,導致腦機之間的長時程互適應能力較弱����,工作性能隨時間顯著下降。
天津大學與清華大學的聯(lián)合研究團隊針對這一難題�,發(fā)現(xiàn)腦電信號的非平穩(wěn)特性與任務腦電演變密切相關?�;诖?����,他們創(chuàng)新性地提出了“雙環(huán)路腦機協(xié)同演進框架”�����,并通過憶阻器神經(jīng)形態(tài)器件加以實現(xiàn)�����。在“雙環(huán)路”框架下,腦與機的學習環(huán)路相互協(xié)同��,共同促進系統(tǒng)性能的提升�����。
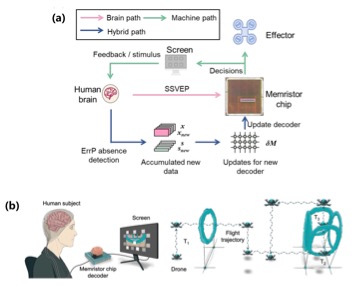
(a)腦-憶阻器交互式更新框架;(b)基于憶阻器腦電解碼的實時腦控無人機飛行����。(聯(lián)合研究團隊供圖)
實驗結(jié)果顯示���,新方案相較于傳統(tǒng)方案��,解碼速度大幅提升��,能耗顯著降低����。更令人矚目的是�����,在連續(xù)6小時的長時程交互實驗中,系統(tǒng)性能不僅保持穩(wěn)定��,準確率還提升了約20%��。這一成果無疑為腦機接口技術的實用化奠定了堅實基礎�����。
天津大學腦機海河實驗室教授許敏鵬表示�,這項研究不僅實現(xiàn)了生物智能與機器智能的互適應、互學習��,還為未來腦機接口系統(tǒng)的發(fā)展提供了重要的理論基礎與技術支撐��。他透露�����,團隊計劃將這一系統(tǒng)拓展至更多便攜式或可穿戴設備中�����,以滿足不同場景下的智能人機交互需求���。
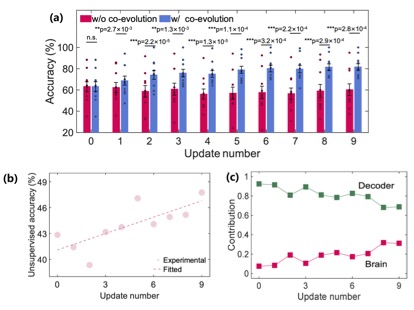
(a)協(xié)同演進腦機解碼正確率較初始狀態(tài)提高20%����;(b)任務相關腦電特征發(fā)生正向演化;(c)腦與憶阻器解碼器實現(xiàn)互適應�����。(聯(lián)合研究團隊供圖)
據(jù)了解���,此研究由天津大學與清華大學團隊合作開展:天津大學腦機海河實驗室團隊完成協(xié)同演進腦機接口軟件系統(tǒng)設計與范式算法實現(xiàn)�,清華大學集成電路學院團隊完成協(xié)同演進憶阻器神經(jīng)形態(tài)器件硬件設計及憶阻器算法設計部署�。(張建新 栗雅婷)
(責任編輯:蔡文斌)
 晉公網(wǎng)安備 14090202000008號
晉公網(wǎng)安備 14090202000008號